Kinked beam#
Given is the following beam [HansWfDUoTechnology22]:
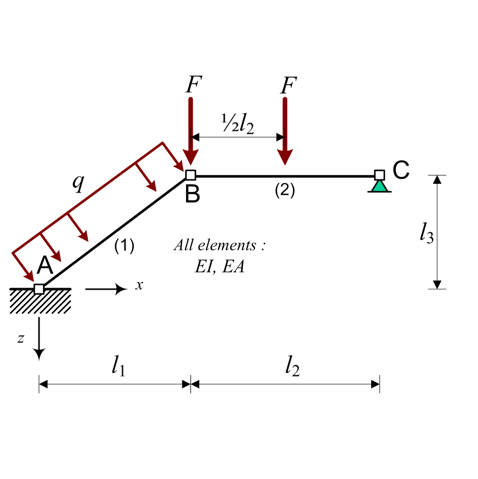
With:
\(l_1 = 4\)
\(l_2 = 5\)
\(l_3 = 3\)
\(EI = 5000\)
\(EA = 15000\)
\(q = 6\)
\(F = 40\)
Exercise (Kinked beam)
Solve this problem.
import matplotlib as plt
import numpy as np
sys.path.insert(1, '/matrixmethod_solution')
import matrixmethod_solution as mm
%config InlineBackend.figure_formats = ['svg']
import numpy as np
import matplotlib as plt
import matrixmethod as mm
%config InlineBackend.figure_formats = ['svg']
#YOUR_CODE_HERE
Solution to Exercise (Kinked beam)
This problem could be solved without any additional coding by adding an additional node at the points load halfway beam (2)
Another options is to add an element with a concentrated load at midspan. This option is chosen here.
import sympy as sym
import sympy as sym
sym.init_printing()
EI, F, x = sym.symbols('EI, F, x')
L = sym.symbols('L',positive=True)
w = sym.Function('w')
ODE_bending = sym.Eq(w(x).diff(x, 4) *EI, F*sym.SingularityFunction(x, L/2, -1))
display(ODE_bending)
V = - sym.integrate(ODE_bending.rhs, x) + sym.symbols('C1')
M = sym.integrate(V, x) + sym.symbols('C2')
kappa = M / EI
phi = sym.integrate(kappa, x) + sym.symbols('C3')
w = -sym.integrate(phi, x) + sym.symbols('C4')
display(w)
w_1, w_2, phi_1, phi_2 = sym.symbols('w_1, w_2, phi_1, phi_2')
phi = -w.diff(x)
eq1 = sym.Eq(w.subs(x,0),w_1)
eq2 = sym.Eq(w.subs(x,L),w_2)
eq3 = sym.Eq(phi.subs(x,0),phi_1)
eq4 = sym.Eq(phi.subs(x,L),phi_2)
C_sol = sym.solve([eq1, eq2, eq3, eq4 ], sym.symbols('C1, C2, C3, C4'))
for key in C_sol:
display(sym.Eq(key, C_sol[key]))
display(sym.collect(M.subs(C_sol).expand(),[w_1,w_2,phi_1,phi_2, F]))
display(sym.collect(w.subs(C_sol).expand(),[w_1,w_2,phi_1,phi_2, F]))
F_1_z, F_2_z, T_1_y, T_2_y = sym.symbols('F_1_z, F_2_z, T_1_y, T_2_y')
eq5 = sym.Eq(-V.subs(C_sol).subs(x,0), F_1_z)
eq6 = sym.Eq(V.subs(C_sol).subs(x,L), F_2_z)
eq7 = sym.Eq(-M.subs(C_sol).subs(x,0), T_1_y)
eq8 = sym.Eq(M.subs(C_sol).subs(x,L), T_2_y)
display(eq5, eq6, eq7, eq8)
A, b = sym.linear_eq_to_matrix([eq5,eq7, eq6, eq8], [w_1, phi_1, w_2, phi_2])
display(A,b)
So, the load vector is: \(\left[\begin{matrix}\frac{F}{2}\\- \frac{F L}{8}\\\frac{F}{2}\\\frac{F L}{8}\end{matrix}\right]\)
The new expression for M is: \(- \frac{F L}{8} + \frac{F x}{2} - F \left(\begin{cases} - \frac{L}{2} + x & \text{for}\: x > \frac{L}{2} \\0 & \text{otherwise} \end{cases}\right) + \phi_{1} \left(- \frac{4 EI}{L} + \frac{6 EI x}{L^{2}}\right) + \phi_{2} \left(- \frac{2 EI}{L} + \frac{6 EI x}{L^{2}}\right) + w_{1} \cdot \left(\frac{6 EI}{L^{2}} - \frac{12 EI x}{L^{3}}\right) + w_{2} \left(- \frac{6 EI}{L^{2}} + \frac{12 EI x}{L^{3}}\right)\)
The new expression for w is: \(\phi_{1} \left(- x + \frac{2 x^{2}}{L} - \frac{x^{3}}{L^{2}}\right) + \phi_{2} \left(\frac{x^{2}}{L} - \frac{x^{3}}{L^{2}}\right) + w_{1} \cdot \left(1 - \frac{3 x^{2}}{L^{2}} + \frac{2 x^{3}}{L^{3}}\right) + w_{2} \cdot \left(\frac{3 x^{2}}{L^{2}} - \frac{2 x^{3}}{L^{3}}\right) + \frac{F L x^{2}}{16 EI} - \frac{F x^{3}}{12 EI} + \frac{F \left(\begin{cases} \left(- \frac{L}{2} + x\right)^{3} & \text{for}\: x > \frac{L}{2} \\0 & \text{otherwise} \end{cases}\right)}{6 EI}\)
These changes have been implemented in the
EB_point_load_elementclass in./matrixmethod/elements.py.
mm.Node.clear()
mm.Element.clear()
l1 = 4
l2 = 5
l3 = 3
EI = 5000
q = 6
F = 40
EA = 15000
nodes = []
nodes.append(mm.Node(0,0))
nodes.append(mm.Node(l1,-l3))
nodes.append(mm.Node(l1+l2,-l3))
elems = []
elems.append(mm.Element(nodes[0], nodes[1]))
elems.append(mm.EB_point_load_element(nodes[1], nodes[2]))
section = {}
section['EI'] = EI
section['EA'] = EA
elems[0].set_section (section)
elems[1].set_section (section)
elems[0].add_distributed_load([0,q])
elems[1].add_point_load_halfway(F)
con = mm.Constrainer()
con.fix_node (nodes[0])
con.fix_dof (nodes[2], 0)
con.fix_dof (nodes[2], 1)
nodes[1].add_load ([0,F,0])
print(con)
for elem in elems:
print(elem)
global_k = np.zeros ((3*len(nodes), 3*len(nodes)))
global_f = np.zeros (3*len(nodes))
for e in elems:
elmat = e.stiffness()
idofs = e.global_dofs()
global_k[np.ix_(idofs,idofs)] += elmat
for n in nodes:
global_f[n.dofs] += n.p
Kff, Ff = con.constrain ( global_k, global_f )
u = np.matmul ( np.linalg.inv(Kff), Ff )
print(u)
print(con.support_reactions(global_k,u,global_f))
This constrainer has constrained the degrees of freedom: [0, 1, 2, 6, 7] with corresponding constrained values: [0, 0, 0, 0, 0])
Element connecting:
node #1:
This node has:
- x coordinate=0,
- z coordinate=0,
- degrees of freedom=[0, 1, 2],
- load vector=[ 9. 12. -12.5]
with node #2:
This node has:
- x coordinate=4,
- z coordinate=-3,
- degrees of freedom=[3, 4, 5],
- load vector=[ 9. 72. -12.5]
Element connecting:
node #1:
This node has:
- x coordinate=4,
- z coordinate=-3,
- degrees of freedom=[3, 4, 5],
- load vector=[ 9. 72. -12.5]
with node #2:
This node has:
- x coordinate=9,
- z coordinate=-3,
- degrees of freedom=[6, 7, 8],
- load vector=[ 0. 20. 25.]
[ 0.01993089 0.07095663 -0.00927066 0.03217232]
[ 41.79266037 -77.42280736 76.42728512 -59.79266037 -26.57719264]
for elem in elems:
u_elem = con.full_disp(u)[elem.global_dofs()]
elem.plot_displaced(u_elem,num_points=51,global_c=True,scale=20)

for elem in elems:
u_elem = con.full_disp(u)[elem.global_dofs()]
elem.plot_moment_diagram(u_elem,num_points=51,global_c=True,scale=0.05)
